问题重述
Background
The 2019-2020 fire season in Australia saw devastating wildfires in every state, with the worst impact in New South Wales and eastern Victoria. Devastating wildfires have occurred in every state of Australia, with New South Wales and eastern Victoria most affected.
In recent years, firefighters have begun using drones for surveillance and situational awareness(SSA). SSA drones carry high-definition and thermal imaging cameras and telemetry sensors for monitoring and reporting data on wearable devices on front-line personnel. Wearable devices can be used as personal positioning beacons or more complex environmental monitors. SSA drones help to monitor the changing situation, so that the Emergency Operations Center (EOC) can best command front-line personnel to obtain the best effect and maximum security.
Analysis
In this paper, based on terrain and fire, we established drones detection model and three-dimensional model of Victoria to solve the following problems.
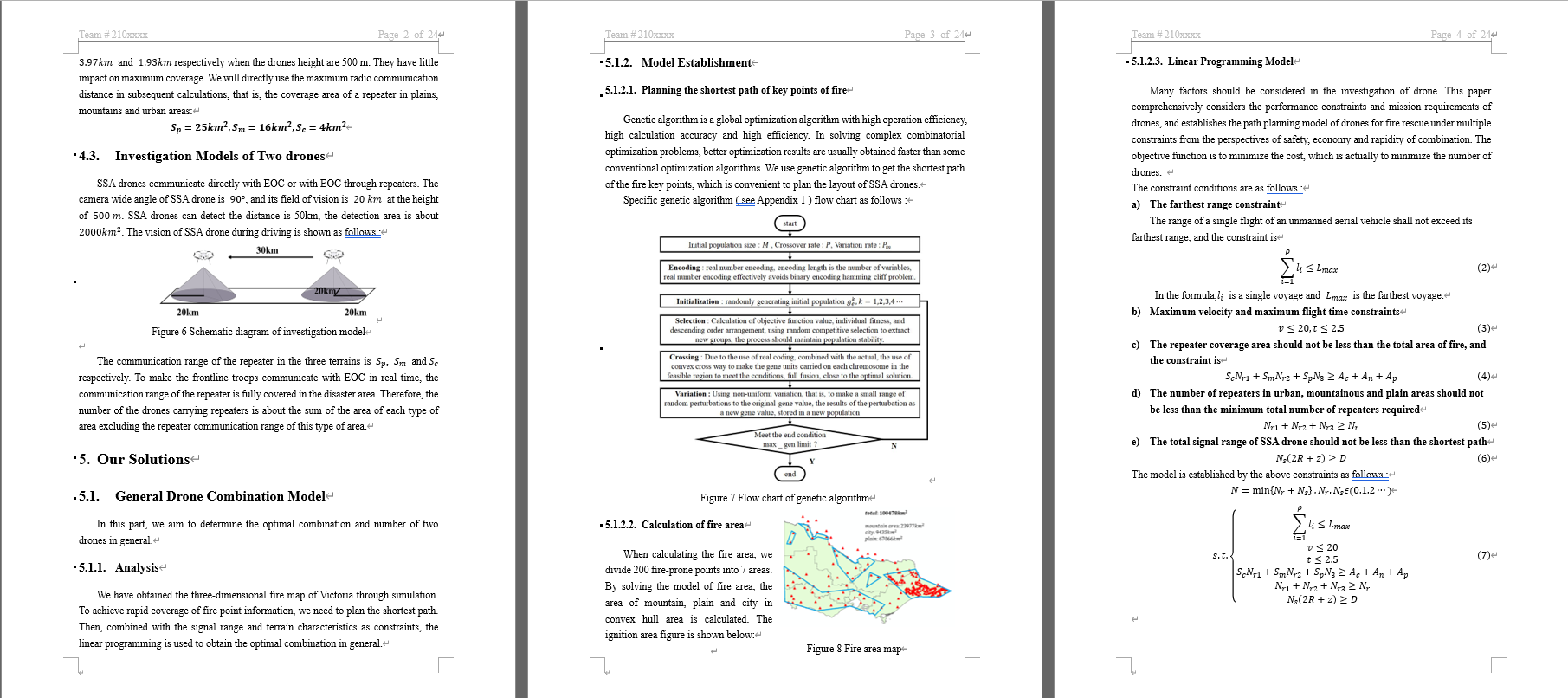
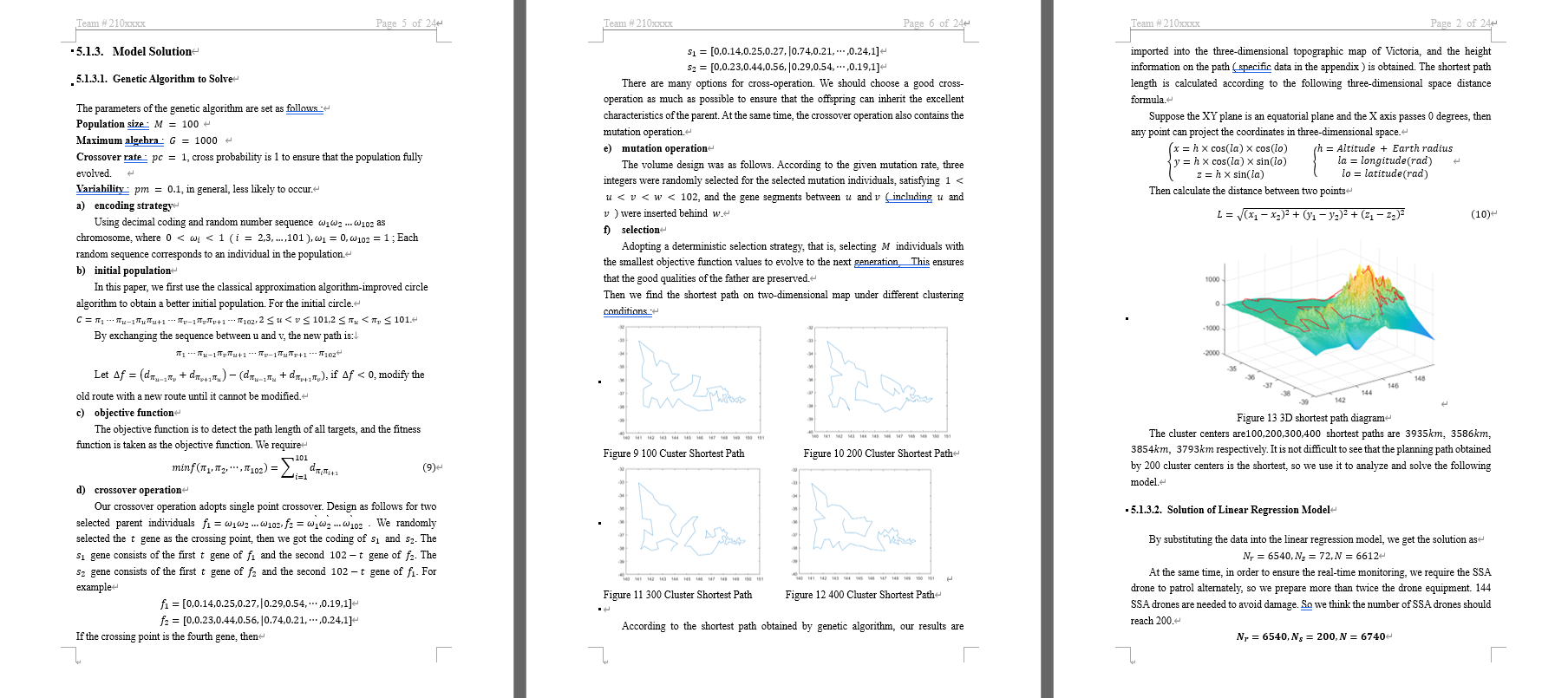
In the first problem, we used clustering analysis and linear interpolation to process data. Then we used Arcgics to get the three-dimensional fire map of Victoria. After that, we got the shortest path by genetic algorithm. At last, we got the optimal combination under general conditions by linear programming with signal range, terrain characteristics and shortest path as constraints.
In the second problem, in order to make the model better adapt to the fire changes in the next decade, we combined the existing fire probability and climate data to evaluate the effect of drones arrangement inside and outside the convex hull. Then we use Monte Carlo model to predict the fire in the next decade to verify and optimize the model in question one.
In the third problem, we optimized the position of the hovering drones carrying repeaters and SSA drones to cope with fires of different sizes on different terrains.
Literature Review
With regard to path planning and intelligent optimization algorithms, there are more and more applications and practical problems, such as rescue, reconnaissance, military and other fields.
The problem of genetic algorithm planning path. Harounabadi, M, Bocksberger, M, & Mitschele-Thiel, A (2018)[1] applied genetic algorithm to path planning of multiple drones. Long, Y, Su, Y., Zhang, H., & Li, M. (2018)[2] proposed an improved genetic algorithm and applied it todrone ground path planning. Liang, Y, & Wang, L (2020) [3] applied genetic algorithm and ant colony algorithm to the path planning of ocean survey.
The problem of particle swarm algorithm planning path. Wang, Y, & Wang, S (2020) [4] studied an improved particle swarm algorithm applied to 3D path planning. Mesquita, R, & Gaspar, P.(2020) [5] studied the particle swarm optimization algorithm applied to drone surveillance. Guo, X, Ji, M, Zhao, Z, Wen, D, & Zhang, W(2020) [6] proposed adrone global path planning based on improved particle swarm algorithm.